Design¶
With SuperElastix we aim to capture a wide range of registration methods, accessible via a single high-level user interface. At the core of our design is a single collection of components with heterogeneous levels of functionality and granularity. This means that a component can implement a single concept (metric, transform, etc.) to be reused in many methods, can implement multiple (tightly coupled) concepts in one, or even be a full registration algorithm. Breaking up algorithms in small components allows a user to mix-and-match component, whereas treating a larger part of algorithms as monolithic blocks lowers the barrier for integration of new methods and paradigms and reuse of existing codebases. By a high level user configuration, components are selected at run-time and are connected via a user-defined network layout. A generic handshake mechanism verifies whether connected components are compatible both mathematically as on a software level. The user is notified if specific combinations are incompatible or not supported (yet).
Network of components¶
A classical approach for a registration toolbox is to use an object-oriented design that decomposes the registration problem into classes like metrics, transforms, optimizers, etc. Extended types of behavior (mutual information, affine transform, etc) can be implemented via subtyping. Such a decomposition, however, might not be adequate to handle all of the diversity in existing registration paradigms. And, even within the same paradigm existing toolboxes have slighly different decomposions. Unification of registration methods by refactoring existing toolboxes into one object-oriented design is a tremendous amount of work, if possible at all. Additionally, an object-oriented design typically poses a rather rigid layout how e.g. an optimizer interacts with a metric and a tranforms. Within the large variety of paradigms, there seems to be little consensus to a standard organization. The design of SuperElastix, therefore, takes a different approach. A registration algorithm is considered to be a network of functional components. The network layout (i.e. amount of nodes and connections) is user configurable and the components (i.e. the nodes) are treated uniformely. In our framework each component formalizes its interfaces that determines whether components can connect. Components can have diverse functionalities such as mutual information, affine transform, or a full registration pipeline, but all have a generic mechanism to perform a handshake.
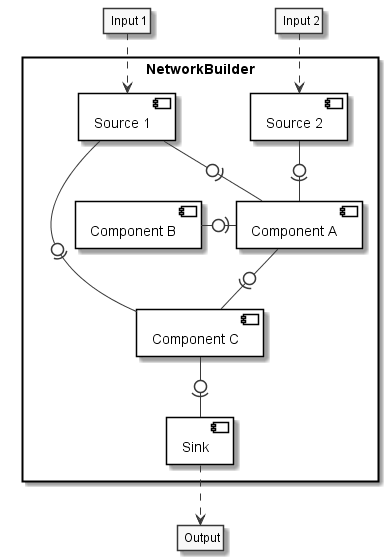
A user configurable network consisting of many connected Components.
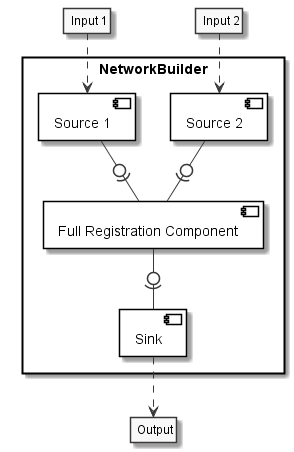
Components can fulfill many tasks upto a full registration pipeline.
Configuring the Network: Blueprints¶
To configure an algorithmic network a Blueprint is passed to SuperElastix.
A blueprint contains the description of a full network or is a partial configuration. Hence, multiple Blueprints can be passed to SuperElastix which together form a full configuration.
A full configuration defines a mathematical graph in terms of nodes: the Component-s, and edges: the Connection-s.
Properties can be put at both the Component-s and the Connection-s.
These properties are in the form of Key: Value pairs, where Keys and Values are strings or Values are lists of strings.
The minimal required property for a Component is "Name": <Identifier>, with <Identifier> being any name in the form of a string. The minimal required properties for a Connection are "Out": <IdentifierA> and "In": <IdentifierB>, with the Identifiers refering to the Components it connects.
{
"Component": {
"Name": <Identifier>,
<PropertyKey1> : <PropertyValue1>,
...
<PropertyKeyN> : <PropertyValueN>
}
"Component": {
...
}
"Connection": {
"Out": <IdentifierA>,
"In": <IdentifierB>,
<PropertyKeyM> : <PropertyValueM>,
...
}
"Connection": {
...
}
}
Additional properties for a Component can be:
- Classname (e.g.
"NameOfClass" : "itkGradientDescentOptimizerv4Component") - A template parameter, (e.g.
"PixelType" : "double") - Settings (e.g.
"NumberOfLevels" : "3"or"SmoothingSigmasPerLevel" : ["8", "4", "2"])
Additional properties for a Connection can be:
- Interface name (e.g.
"NameOfInterface": "itkMetricv4Interface") - template parameter (e.g.
"Dimensionality" : "3") - A tag (e.g.
"Role" : "Fixed")
Given that the json file is valid and the blueprint meets the minimal required properties, SuperElastix has a flexible mechanism to parse all additional properties and to realize the algorithmic network without unnescarilly requiring a verbose configuration file and aimed at having a user-extendible database of components. Since, initially, each node in the graph can be any component that is in the component database of SuperElastix, each property is considered an exclusion criterion. Additionally, the properties defined at a connection form exclusion criteria for both components involved. When all exclusion criteria are considered and for any node in the graph it cannnot be uniquely defined which component needs to be realized, SuperElastix will stop and report which component requires more or less criteria.
The advantages of this mechanism are:
- A user can select a component based on its connections (i.e. its role; what it can do) and doen’t have to know the particular name of the class.
- By extending SuperElastix with new components that have identical connections to existing components it will automatically ask the user to provide additional (discriminating) properties.
- A user, for instance, does not need to specify “Dimensionality” : “3” for all components in the Blueprint if this can be deduced from one component in the network via its connections.
- A partially defined Blueprint can leave certain properties open, such that these can be defined by an other partially configuring blueprint that is passed to SuperElastix additionally.
Generic handshake mechanism¶
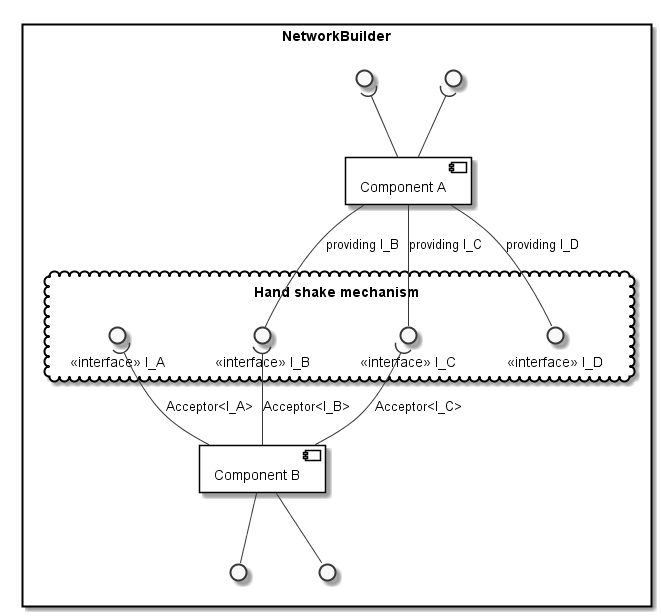
The handshake mechanism validates whether components can be connected or not.
Prior to running the registration algorithm contructed from a user-defined network, SuperElastix validates whether components can be connected or not. This hand mechanism performs the necessary checks on what a component can do (as defined by its interfaces), which is required to establish a connection. The advantage of explicitly handling this generically and on a higher level, is that components themselves do not need to perform these checks on neighboring components, which would require a component to embed specific knowledge about other components.
To manage all possible types of collaboration, SuperElastix maintains an extensible collection of component interfaces. Any component in the toolbox must be defined in terms of one or more interfaces, which are either accepting or providing. After succesfull handshakes all components check if sufficient accepting interfaces have been connected. The underlying implementation details can be found in the development section.